خبر های ویژه
11 مرداد 1403
تحقیقات نشان میدهد که اتومبیلهای رباتیک وعده بهبود ترافیک را حتی زمانی که بیشتر اتومبیلهای اطراف آنها توسط افراد هدایت میشوند، بهبود می دهند
ویزی لی استادیار علوم کامپیوتر دانشگاه تنسی
من و همکارانم دریافتیم که وسایل نقلیه رباتیک می توانند جریان ترافیک در شهرها را حتی زمانی که با وسایل نقلیه ای که توسط انسان ها هدایت می شوند مخلوط شوند، بهینه کنند و در نتیجه کارایی ترافیک، ایمنی و مصرف انرژی را بهبود بخشند. وسایل نقلیه رباتی دیگر مفهومی علمی-تخیلی نیستند: شهرهای سراسر جهان از سال 2016 رباتاکسی خودران را آزمایش می کنند. با افزایش حضور ربات وسایل نقلیه در ترافیک و دوره طولانی قابل پیش بینی انتقال از ترافیک مختلط به ترافیک کاملاً مستقل ، تیم من و من تعجب کردم که آیا وسایل نقلیه روباتی و تعامل آنها با وسایل نقلیه انسان محور می تواند مشکلات ترافیکی بدنام امروزی را کاهش دهد؟ من یک دانشمند کامپیوتر هستم که هوش مصنوعی را برای حمل و نقل و شهرهای هوشمند مطالعه می کنم. من و همکارانم فرض کردیم که با افزایش تعداد وسایل نقلیه روباتی در ترافیک، میتوانیم از هوش مصنوعی برای توسعه الگوریتمهایی برای کنترل سیستم پیچیده ترافیک ترکیبی استفاده کنیم. این الگوریتمها نه تنها همه وسایل نقلیه را قادر میسازند تا از نقطه A به نقطه B به آرامی حرکت کنند، بلکه مهمتر از آن، ترافیک کلی را با اجازه دادن به وسایل نقلیه روباتی برای تأثیرگذاری بر وسایل نقلیهای که توسط افراد هدایت میشوند، بهینه میکنند. برای آزمایش فرضیه خود، از شاخه ای از هوش مصنوعی به نام یادگیری تقویتی استفاده کردیم که در آن یک عامل هوشمند یاد می گیرد تا از طریق تعامل با محیط خود، پاداش های تجمعی را به حداکثر برساند. با تعیین پاداش برای وسایل نقلیه ربات شبیهسازی شده برای اولویتبندی اهدافی مانند کارایی ترافیک یا مصرف انرژی، آزمایشهای ما نشان میدهد که میتوانیم به طور موثر ترافیک مختلط را در تقاطعهای پیچیده دنیای واقعی تحت شرایط ترافیک در دنیای واقعی در شبیهسازی مدیریت کنیم.
تبریز امروز:

من و همکارانم دریافتیم که وسایل نقلیه رباتیک می توانند جریان ترافیک در شهرها را حتی زمانی که با وسایل نقلیه ای که توسط انسان ها هدایت می شوند مخلوط شوند، بهینه کنند و در نتیجه کارایی ترافیک، ایمنی و مصرف انرژی را بهبود بخشند.
وسایل نقلیه رباتی دیگر مفهومی علمی-تخیلی نیستند: شهرهای سراسر جهان از سال 2016 رباتاکسی خودران را آزمایش می کنند. با افزایش حضور ربات وسایل نقلیه در ترافیک و دوره طولانی قابل پیش بینی انتقال از ترافیک مختلط به ترافیک کاملاً مستقل ، تیم من و من تعجب کردم که آیا وسایل نقلیه روباتی و تعامل آنها با وسایل نقلیه انسان محور می تواند مشکلات ترافیکی بدنام امروزی را کاهش دهد؟
من یک دانشمند کامپیوتر هستم که هوش مصنوعی را برای حمل و نقل و شهرهای هوشمند مطالعه می کنم. من و همکارانم فرض کردیم که با افزایش تعداد وسایل نقلیه روباتی در ترافیک، میتوانیم از هوش مصنوعی برای توسعه الگوریتمهایی برای کنترل سیستم پیچیده ترافیک ترکیبی استفاده کنیم. این الگوریتمها نه تنها همه وسایل نقلیه را قادر میسازند تا از نقطه A به نقطه B به آرامی حرکت کنند، بلکه مهمتر از آن، ترافیک کلی را با اجازه دادن به وسایل نقلیه روباتی برای تأثیرگذاری بر وسایل نقلیهای که توسط افراد هدایت میشوند، بهینه میکنند.
برای آزمایش فرضیه خود، از شاخه ای از هوش مصنوعی به نام یادگیری تقویتی استفاده کردیم که در آن یک عامل هوشمند یاد می گیرد تا از طریق تعامل با محیط خود، پاداش های تجمعی را به حداکثر برساند. با تعیین پاداش برای وسایل نقلیه ربات شبیهسازی شده برای اولویتبندی اهدافی مانند کارایی ترافیک یا مصرف انرژی، آزمایشهای ما نشان میدهد که میتوانیم به طور موثر ترافیک مختلط را در تقاطعهای پیچیده دنیای واقعی تحت شرایط ترافیک در دنیای واقعی در شبیهسازی مدیریت کنیم.
الگوریتم ما به خودروهای رباتیک می آموزد که با برقراری ارتباط با یکدیگر، جریان ترافیک را بهینه کنند. هدف سیستم جمعی اتومبیلها جریان ترافیک روان است، حتی زمانی که هر اتومبیل جداگانه تصمیم میگیرد بر اساس محیط نزدیک خود چه زمانی وارد یک تقاطع شود. از آنجایی که خودروهای رباتیک در بین خودروهایی که توسط مردم هدایت می شوند پراکنده شده اند، تمام ترافیک تحت تأثیر الگوریتم قرار می گیرد.
ما متوجه شدیم که وقتی وسایل نقلیه روباتی فقط 5 درصد از ترافیک را در شبیه سازی ما تشکیل می دهند، ترافیک از بین می رود. با کمال تعجب، رویکرد ما حتی نشان میدهد که وقتی وسایل نقلیه روباتی 60 درصد ترافیک را تشکیل میدهند، کارایی ترافیک نسبت به ترافیک کنترل شده توسط چراغهای راهنمایی برتر است.
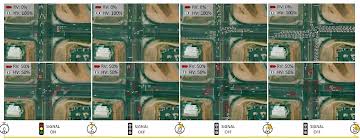
شبیه سازی خاموشی در یک تقاطع ترافیکی. ردیف بالا شرایط ترافیکی بدون وسایل نقلیه را نشان می دهد. خاموشی در نقطه 5 دقیقه رخ می دهد. احتقان به سرعت در عرض 15 دقیقه شکل می گیرد. ردیف پایین ترافیک با 50 درصد وسایل نقلیه را نشان می دهد. خاموشی باعث ازدحام نمی شود. وانگ و همکاران
چرا مهم است
ترافیک در هر شهر بزرگ در سراسر جهان در حال بدتر شدن است که منجر به هزینه های اقتصادی و زیست محیطی قابل توجهی می شود. یکی از چالش برانگیزترین مشکلات جامعه امروزی است. روشهای کنترل ترافیک کنونی، مانند چراغهای راهنمایی، کارایی محدودی در کاهش تاخیر و ازدحام دارند.
وسایل نقلیه رباتی مبتنی بر هوش مصنوعی یک راه حل بالقوه ارائه می دهند، اما مطالعات موجود اغلب اتصال جهانی و کنترل متمرکز همه وسایل نقلیه روباتی را فرض می کنند، سناریویی که به احتمال زیاد به این زودی محقق نمی شود. انتقال به ترافیک کاملاً خودمختار احتمالاً تدریجی است و منجر به یک دوره طولانی تردد مختلط با وسایل نقلیه روباتی و انسان محور می شود.
این ما را به توسعه الگوریتمهای کنترلی سوق داد که از وسایل نقلیه روباتیک برای بهرهبرداری از مزایای اجتماعی سیستمهای حملونقل خودران بدون نیاز به خودکار بودن همه یا حتی اکثر وسایل نقلیه استفاده میکنند.
چه تحقیقات دیگری در حال انجام است
مطالعات اخیر پتانسیل کنترل ترافیک مختلط را در سناریوهایی مانند جاده های کمربندی، جاده های شکل هشت، تنگناها و ادغام بزرگراه ها، تقاطع های دو طرفه و دوربرگردان ها نشان داده اند. با این حال، این سناریوها معمولاً فاقد پیچیدگی در دنیای واقعی هستند و فقط شامل تعداد محدودی از وسایل نقلیه است که نیاز به هماهنگی دارند.
کار ما اولین کاری است که امکان کنترل ترافیک مختلط از طریق وسایل نقلیه روباتی در تقاطع های پیچیده و واقعی را نشان می دهد. توانایی کنترل ترافیک در این تقاطع ها یک گام اساسی برای کنترل ترافیک در سطح شهر است.
ما قصد داریم چارچوب خود را گسترش دهیم تا رفتارهای رانندگی اضافی را برای ربات ها بگنجانیم
ارتباط با تبریز امروز
اخبار ، گزارشات ، عکسها و فیلم های خود را برای ما ارسال دارید . برای ارسال میتوانید از طریق آدرس تلگرامی یا ایمیل استفاده کنید.
اشتراک در خبرنامه
برای اطلاع از آخرین خبرهای تبریز امروز در کانال تلگرام ما عضو شوید.

فرم تماس با تبریز امروز
کلیه حقوق این سایت متعلق به پایگاه خبری تبریز امروز بوده و استفاده از مطالب آن با ذکر منبع بلامانع
است.
طراحی وتولید
توسططراح وب سایت